
【導(dǎo)讀】在電路設(shè)計(jì)中,經(jīng)常會出現(xiàn)這樣或者那樣的問題。在解決這些問題的時(shí)候,往往就是一個學(xué)習(xí)的過程。在本篇文章通過舉例,給出了一種buck-boost數(shù)字電源反饋電壓問題的解決方法,希望能對大家有所幫助。
Buck-boost電路輸出相對輸入反相,如果做成用MCU提供buck_boost所需的PWM以及反饋檢測的形式,那么由于反饋檢測要用到MCU的ADC,這就導(dǎo)致了MCU上的ADC和所提供的PWM電平不一致,如圖1所示。
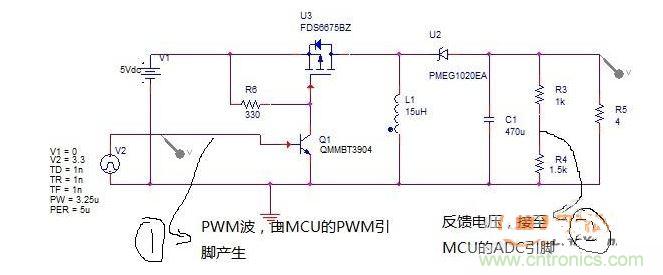
圖1
如果MCU和BUCK_BOOST共地的話,那么2處的反饋電壓將會超出MCU的adc模塊的采樣范圍。那么問題來了,如果必須用MCU控制BUCK-BOOST電路,那么要怎么解決電壓反饋的問題?
其實(shí)這個問題并不難解決,以LPC1114這款MCU為例,將輸出地作為系統(tǒng)參考地。但是這樣一來,面臨以下幾個問題:
驅(qū)動電路問題
由于輸出地為系統(tǒng)參考地,所以Mos是浮地的,可采用隔離驅(qū)動(變壓器驅(qū)動)或使用帶自舉電路的IC(如IR2101S)。
輔助電源問題
輔助電源需要兩路:為MCU供電,為驅(qū)動電路供電??蛇x的方案有多種,這里給出其中一種:
在電路輸入電壓是36V的情況下,用Buck芯片LM2576接到輸入端,將電壓降到12V,再用分離元件搭建了一個自激推挽電路,將12V轉(zhuǎn)成12V隔離輸出(給IR2101s供電),這樣解決了參考地問題,再用一片Buck芯片將得到的12V轉(zhuǎn)到3.3V給MCU供電。
這樣一來,驅(qū)動和采樣的問題就迎刃而解了。在面對問題時(shí),大家不妨多查找一下資料,或者向高手提問,這樣在解決問題的同時(shí)也獲得了新的知識,一舉兩得。


